 |
About Me
Paper
Photos/Video
Links
|
|
|
|
Photos and Video
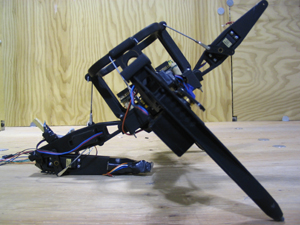
Experiment One - Broken Robot
All candidate solutions started from the initial state shown below. Only one leg of the robot is active, the other legs have their servo motors locked and sensors disabled. The shank of the leg opposite the active leg is detatched, creating balancing problems. The outputs of the touch and angle sensors on the active leg are fed into the FPAA neural net. The signals output by the neural net are converted to PWM signals and sent to the active leg's servo motors. See paper for more details.
Video montage of evolving controllers over 7 generations: [WMV format (3.62MB)]
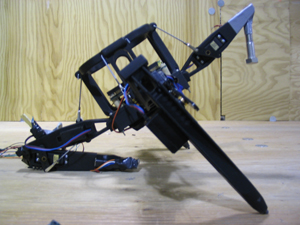
Experiment Two - Broken Robot with Pendulum
This is the same as experiment one except that a pendulum was attached to the leg opposite the active leg. See paper for more details.
Video montage of evolving controllers over 5 generations with an attached pendulum: [WMV format (3.95MB)]
|