Caliber: Camera Localization and Calibration Using Rigidity Constraints
Albert Liu, Steve Marschner, Noah Snavely
Abstract
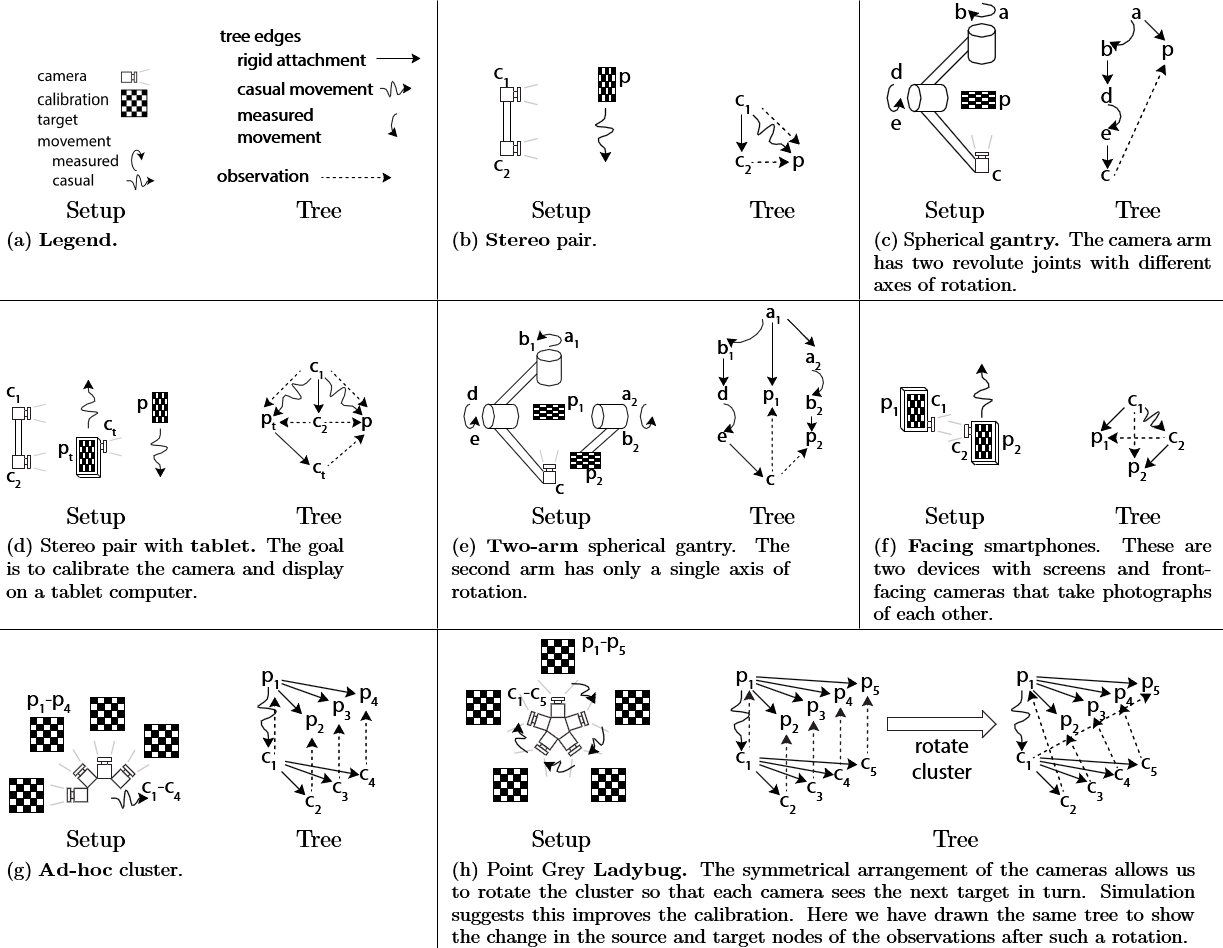
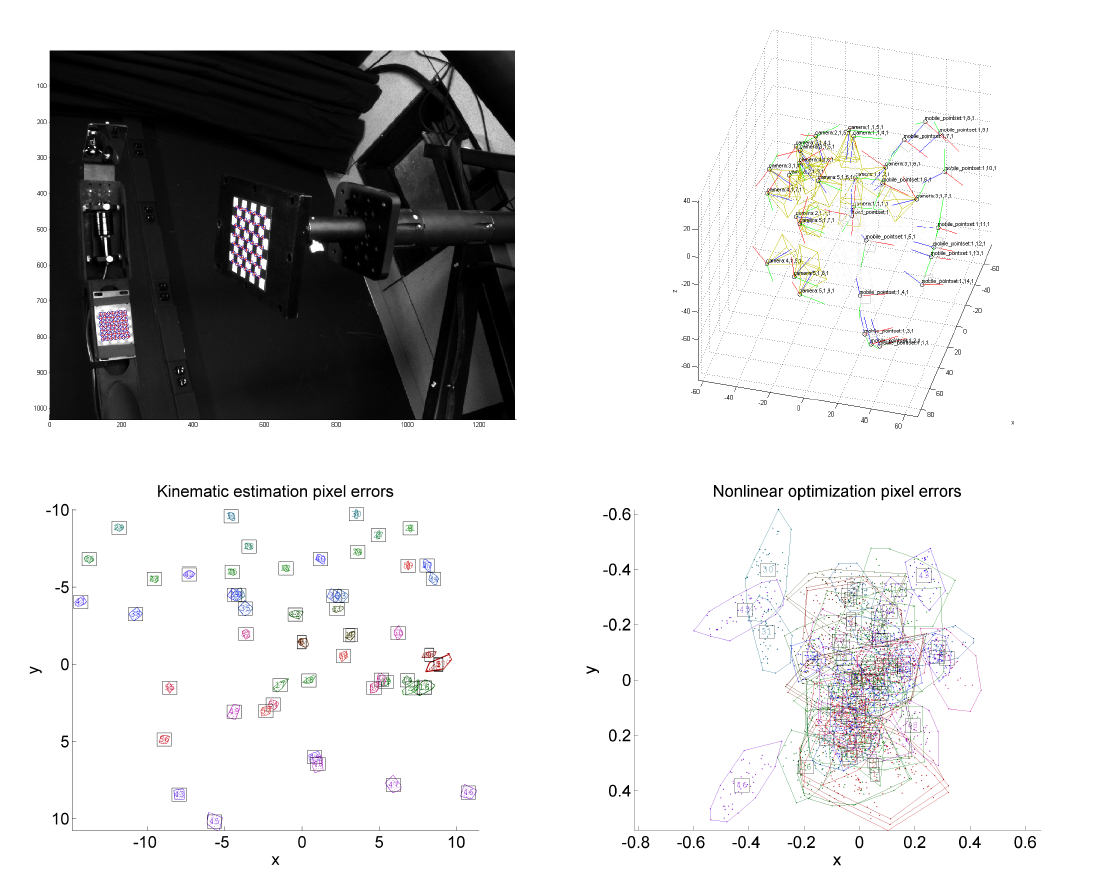
This article presents a camera calibration system, Caliber, and the underlying pose estimation problem it solves, which we call sensor localization with rigidity (SL-R). SL-R is a constraint-satisfaction-like problem that finds a set of poses satisfying certain constraints. These constraints include not only relative pose constraints such as those found in SLAM and motion estimation problems, but also rigidity constraints: the notion of objects that are rigidly attached to each other so that their relative pose is fixed over time even if that pose is not known a priori. We show that SL-R is NP-hard, but give an inference-based algorithm that works well in practice. SL-R enables Caliber, a tool to calibrate systems of cameras connected by rigid or actuated links, using image observations and information about known motions of the system. The user provides a model of the system in the form of a kinematic tree, and Caliber uses our SL-R algorithm to generate an estimate for the rigidity constraints, then performs nonlinear optimization to produce a solution that is locally least-squares optimal in terms of reprojection error. In this way, Caliber is able to calibrate a variety of setups that would have previously required special-purpose code to calibrate. We demonstrate Caliber in a number of different scenarios using both synthetic and experimental data.
Links
Article (Springer)
Article (self-archive) (PDF, 6 MB)
Supplemental (self-archive) (PDF, 9 MB)
Source code (Github)
Manual (PDF, 0.4 MB)
Example images
BibTeX
@Article{Liu2016,
author="Liu, Albert
and Marschner, Steve
and Snavely, Noah",
title="Caliber: Camera Localization and Calibration Using Rigidity Constraints",
journal="International Journal of Computer Vision",
year="2016",
volume="118",
number="1",
pages="1--21",
issn="1573-1405",
doi="10.1007/s11263-015-0866-1",
url="http://dx.doi.org/10.1007/s11263-015-0866-1"
}
Acknowledgements
Funding for this work was provided by National Science Foundation grant IIS-1011919, by the Intel Science and Technology Center for Visual Computing, and by a gift from Autodesk.
We would like to thank Wenzel Jakob, Pramook Khungurn, Bruce Walter, and Rundong Wu for testing out Caliber on real problems and providing feedback.