Augmenting Lane Perception and Topology Understanding with Standard Definition Navigation Maps
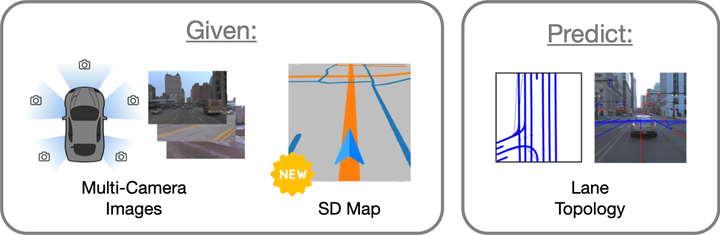 Motivation figure for SMERF. We are the first work to augment lane-topology prediction with standard definition maps.
Motivation figure for SMERF. We are the first work to augment lane-topology prediction with standard definition maps.
Abstract
Autonomous driving has traditionally relied heavily on costly and labor-intensive High Definition (HD) maps, hindering scalability. In contrast, Standard Definition (SD) maps are more affordable and have worldwide coverage, offering a scalable alternative. In this work, we systematically explore the effect of SD maps for real-time lane-topology understanding. We propose a novel framework to integrate SD maps into online map prediction and propose a Transformer-based encoder, SD Map Encoder Representations from transFormers, to leverage priors in SD maps for the lane-topology prediction task. This enhancement consistently and significantly boosts (by up to 60%) lane detection and topology prediction on current state-of-the-art online map prediction methods without bells and whistles and can be immediately incorporated into any Transformer-based lane-topology method. Code is available at: https://github.com/NVlabs/SMERF.
Check out our project page for demos, code, and more.