Hani Altwaijry
Image Geo-Localization
My main research falls within the topic of Image Geo-Localization. The goal is defined as: given in image, find the location of that image given the image contents only. My recent work has focused on matching aerial images that are separated by a wide-baseline, with the goal of establishing methods that perform cross-view image matching.

Aerial Imagery Matching
Correspondence matching is a core problem in computer vision. Under narrow baseline viewing conditions, this problem has been successfully addressed using SIFT-like approaches. However, under wide baseline viewing conditions these methods often fail. In this work we propose a method for correspondence estimation that addresses this challenge for aerial scenes in urban environments. Our method creates synthetic views and leverages self-similarity cues to recover correspondences using a RANSAC-based approach aided by self-similarity graph-based sampling.
[pdf]
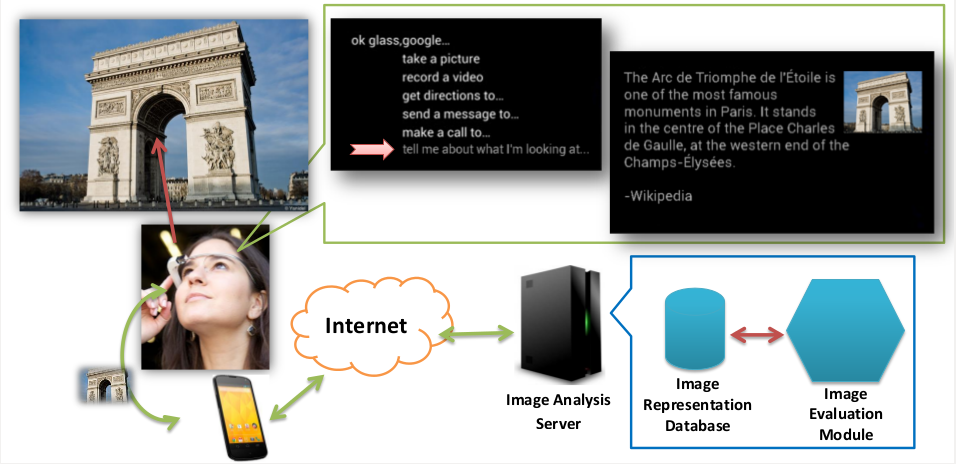
Recognizing Locations with Google Glass
Wearable computers are rapidly gaining popularity as more people incorporate them into their everyday lives. The introduction of these devices allows for wider deployment of Computer Vision based applications. In this paper, we describe a system developed to deliver users of wearable computers a tour guide experience. In building our system, we compare and contrast different techniques towards achieving our goals. Those techniques include using various descriptor types, such as HOG, SIFT and SURF, under different encoding models, such as holistic approaches, Bag-of-Words, and Fisher Vectors. We evaluate those approaches using classification methods including Nearest Neighbor and Support Vector Machines. We also show how to incorporate information external to images, specifically GPS, to improve the user experience.
[pdf][video]
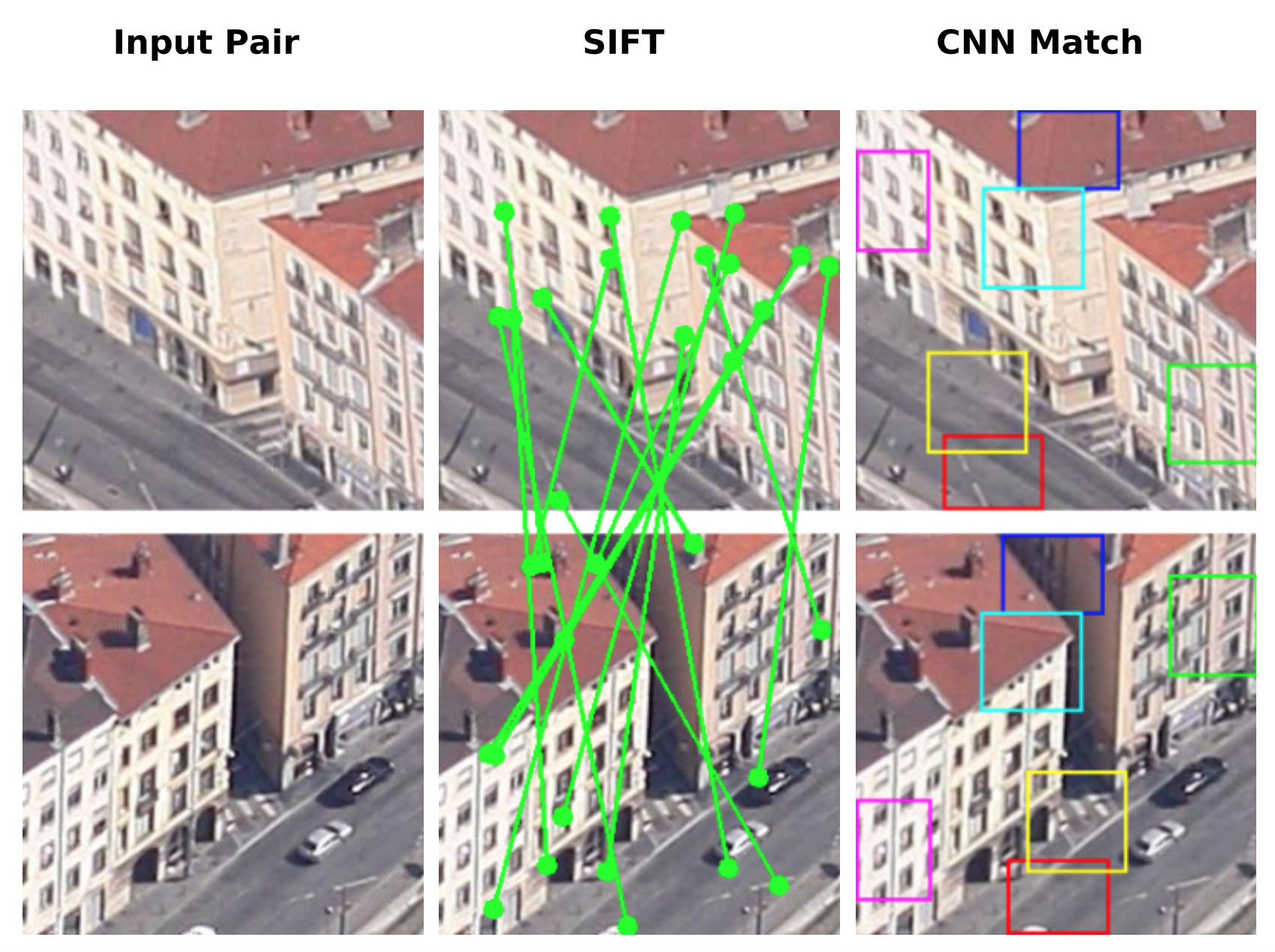
Learning to Match Aerial Images with Deep Attentive Architectures
Image matching is a fundamental problem in Computer Vision. In the context of feature-based matching, SIFT and its variants have long excelled in a wide array of applications. However, for ultra-wide baselines, as in the case of aerial images captured under large camera rotations, the appearance variation goes beyond the reach of SIFT and RANSAC. In this paper we propose a data-driven, deep learning-based approach that sidesteps local correspondence by framing the problem as a classification task. Furthermore, we demonstrate that local correspondences can still be useful. To do so we incorporate an attention mechanism to produce a set of probable matches, which allows us to further increase performance. We train our models on a dataset of urban aerial imagery consisting of `same' and `different' pairs, collected for this purpose, and characterize the problem via a human study with annotations from Amazon Mechanical Turk. We demonstrate that our models outperform the state-of-the-art on ultra-wide baseline matching and approach human accuracy.
[pdf]
Facial Attractiveness Ranking
Facial Attractiveness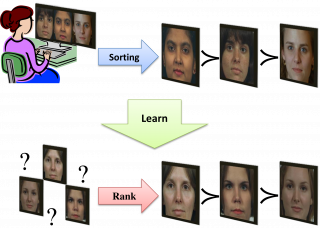
Relative Ranking of Facial Attractiveness
Automatic evaluation of human facial attractiveness is a challenging problem that has received little attention from the computer vision community. Here, we approach beauty from a relative ranking perspective. Our training data are faces sorted based on a individuals's personal preference, which we use to learn how to rank novel faces according to that person's taste.
[pdf]
SIMPLE: Satellite Intelligent Mission PLanning Engine
KACST, Saudi Arabia
SIMPLE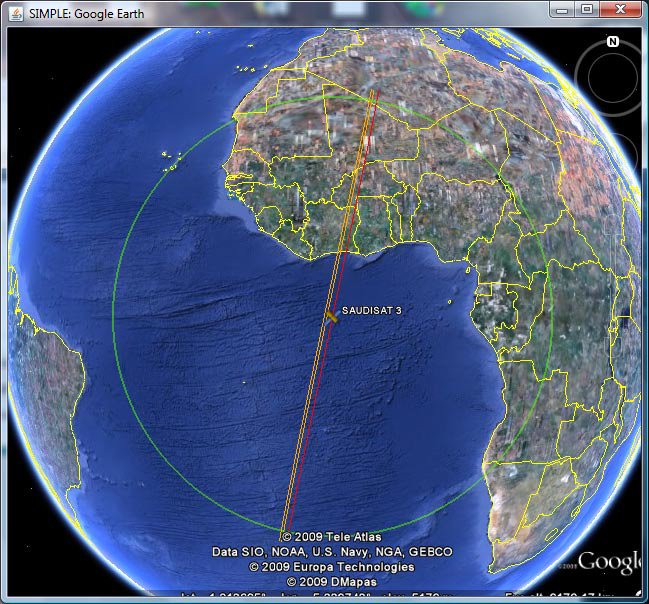
SIMPLE
In this project, we have an automated mission planning system was developed that performs mission planning automatically on behalf of ground station operators. The system schedules when and where the satellite is supposed to capture images. The scheduling is made to maximize a score based on the importance of candidate ground locations. To achieve this, we have used stochastic search techniques along with Satellite Tracking methods and a Spatial database.
[video]