Our training consists of the set D={(x1,y1),…,(xn,yn)} drawn from some unknown distribution P(X,Y). Because all pairs are sampled i.i.d., we obtain
P(D)=P((x1,y1),…,(xn,yn))=Πnα=1P(xα,yα).
If we do have enough data, we could estimate P(X,Y) similar to the coin example in the
previous lecture, where we imagine a gigantic die that has one side for each possible value of (x,y). We can estimate the probability that one specific side comes up through counting:
ˆP(x,y)=∑ni=1I(xi=x∧yi=y)n,
where I(xi=x∧yi=y)=1 if xi=x and yi=y and 0 otherwise.
Of course, if we are primarily interested in predicting the label y from the features x, we may estimate P(Y|X) directly instead of P(X,Y). We can then use the Bayes Optimal Classifier for a specific ˆP(y|x) to make predictions.
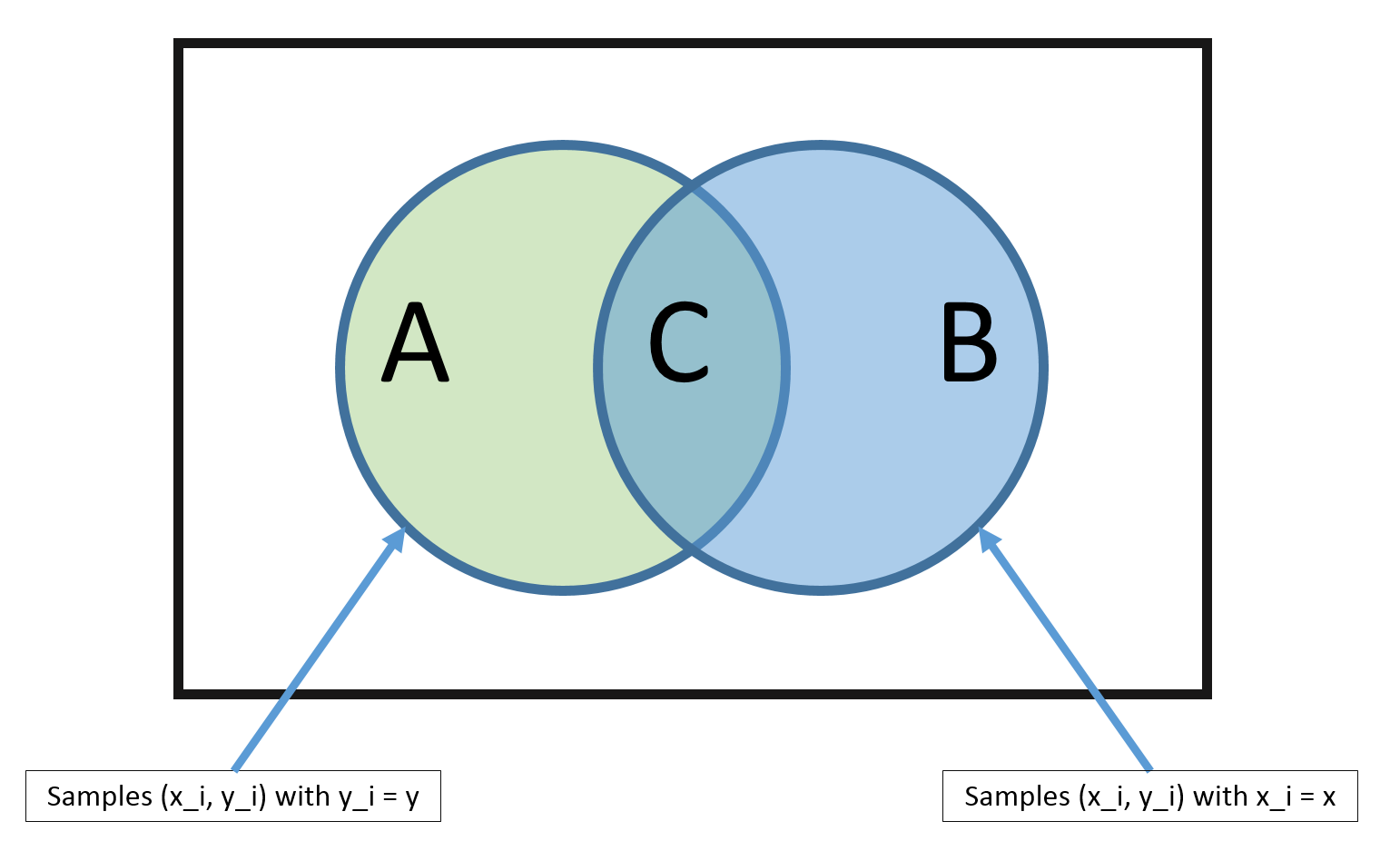
So how can we estimate ˆP(y|x)? Previously we have derived that ˆP(y)=∑ni=1I(yi=y)n. Similarly, ˆP(x)=∑ni=1I(xi=x)n and ˆP(y,x)=∑ni=1I(xi=x∧yi=y)n. We can put these two together ˆP(y|x)=ˆP(y,x)P(x)=∑ni=1I(xi=x∧yi=y)∑ni=1I(xi=x)
Problem: But there is a big problem with this method. The MLE estimate is only good if there are many training vectors with the same identical features as x! In high dimensional spaces (or with continuous x), this never happens! So |B|→0 and |C|→0.
We can approach this dilemma with a simple trick, and an additional assumption. The trick part is to estimate P(y) and P(x|y) instead, since, by Bayes rule, P(y|x)=P(x|y)P(y)P(x).
Estimating P(x|y), however, is not easy! The additional assumption that we make is the Naive Bayes assumption.
Naive Bayes Assumption: P(x|y)=d∏α=1P(xα|y),where xα=[x]α is the value for feature αFor example, a setting where the Naive Bayes classifier is often used is spam filtering. Here, the data is emails and the label is spam or not-spam. The Naive Bayes assumption implies that the words in an email are conditionally independent, given that you know that an email is spam or not. Clearly this is not true. Neither the words of spam or not-spam emails are drawn independently at random. However, the resulting classifiers can work well in practice even if this assumption is violated.
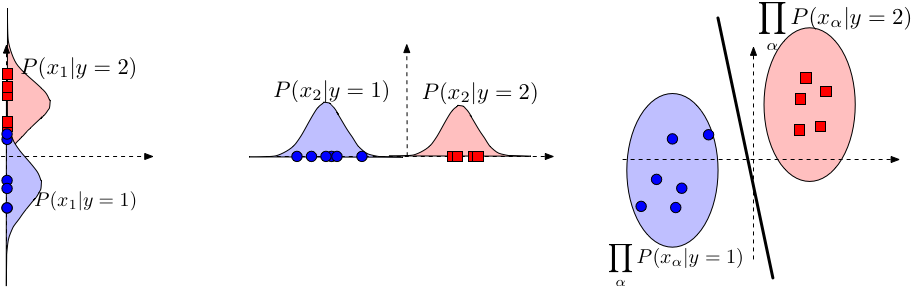
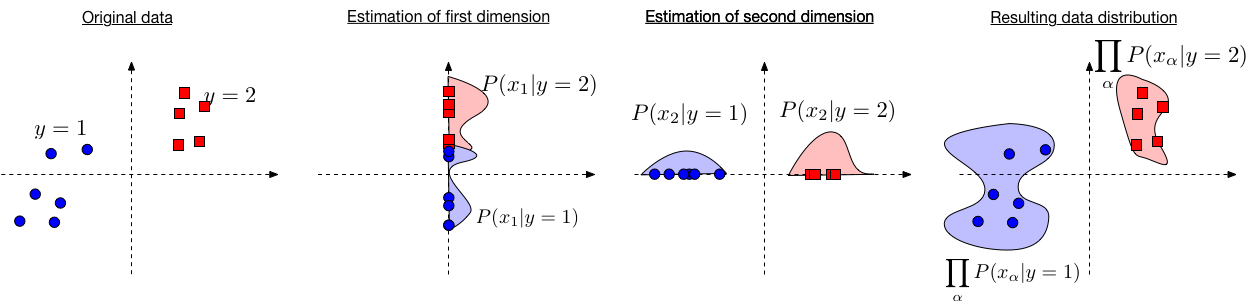 Illustration behind the Naive Bayes algorithm. We estimate P(xα|y) independently in each dimension (middle two images) and then obtain an estimate of the full data distribution by assuming conditional independence P(x|y)=∏αP(xα|y) (very right image).
Illustration behind the Naive Bayes algorithm. We estimate P(xα|y) independently in each dimension (middle two images) and then obtain an estimate of the full data distribution by assuming conditional independence P(x|y)=∏αP(xα|y) (very right image).
So, for now, let's pretend the Naive Bayes assumption holds. Then the Bayes Classifier can be defined as h(x)=argmaxyP(y|x)=argmaxyP(x|y)P(y)P(x)=argmaxyP(x|y)P(y)(P(x) does not depend on y)=argmaxyd∏α=1P(xα|y)P(y)(by the naive Bayes assumption)=argmaxyd∑α=1log(P(xα|y))+log(P(y))(as log is a monotonic function)
 |
In words (without the l hallucinated samples) this means # of samples with label c that have feature α with value j # of samples with label c.
 |
If feature values don't represent categories (e.g. single/married) but counts we need to use a different model. E.g. in the text document categorization, feature value xα=j means that in this particular document x the αth word in my dictionary appears j times. Let us consider the example of spam filtering. Imagine the αth word is indicative of being "spam". Then if xα=10 means that this email is likely spam (as word α appears 10 times in it). And another email with x′α=20 should be even more likely to be spam (as the spammy word appears twice as often). With categorical features this is not guaranteed. It could be that the training set does not contain any email that contain word α exactly 20 times. In this case you would simply get the hallucinated smoothing values for both spam and not-spam - and the signal is lost. We need a model that incorporates our knowledge that features are counts - this will help us during estimation (you don't have to see a training email with exactly the same number of word occurrences) and during inference/testing (as you will obtain these monotonicities that one might expect). The multinomial distribution does exactly that.
Features: xα∈{0,1,2,…,m} and m=d∑α=1xα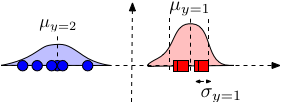 |
Features: xα∈R(each feature takes on a real value)
Model P(xα∣y): Use Gaussian distribution P(xα∣y=c)=N(μαc,σ2αc)=1√2πσαce−12(xα−μαcσαc)2
Parameter estimation: As always, we estimate the parameters of the distributions for each dimension and class independently. Gaussian distributions only have two parameters, the mean and variance. The mean μα,y is estimated by the average feature value of dimension α from all samples with label y. The (squared) standard deviation is simply the variance of this estimate. μαc←1ncn∑i=1I(yi=c)xiαwhere nc=n∑i=1I(yi=c)σ2αc←1ncn∑i=1I(yi=c)(xiα−μαc)2
1. Suppose that yi∈{−1,+1} and features are multinomial
We can show that
h(x)=argmaxyP(y)d∏α−1P(xα∣y)=sign(w⊤x+b)
As before, we define P(xα|y=+1)∝θxαα+ and P(y=+1)=π+: [w]α=log(θα+)−log(θα−)b=log(π+)−log(π−)
Simplifying this further leads to w⊤x+b>0⟺d∑α=1[x]α[w]α⏞(log(θα+)−log(θα−))+b⏞log(π+)−log(π−)>0(Plugging in definition of w,b.)⟺exp(d∑α=1[x]α(log(θα+)−log(θα−))+log(π+)−log(π−))>1(exponentiating both sides)⟺d∏α=1exp(logθ[x]αα++log(π+))exp(logθ[x]αα−+log(π−))>1Because alog(b)=log(ba) and exp(a−b)=eaeb operations⟺d∏α=1θ[x]αα+π+θ[x]αα−π−>1Because exp(log(a))=a and ea+b=eaeb⟺∏dα=1P([x]α|Y=+1)π+∏dα=1P([x]α|Y=−1)π−>1Because P([x]α|Y=−1)=θx]αα−⟺P(x|Y=+1)π+P(x|Y=−1)π−>1By the naive Bayes assumption. ⟺P(Y=+1|x)P(Y=−1|x)>1By Bayes rule (the denominator P(x) cancels out, and π+=P(Y=+1).)⟺P(Y=+1|x)>P(Y=−1|x)⟺argmaxyP(Y=y|x)=+1i.e. the point x lies on the positive side of the hyperplane iff Naive Bayes predicts +1
2. In the case of continuous features (Gaussian Naive Bayes), we can show that P(y∣x)=11+e−y(w⊤x+b)