CS4670/5670: Computer Vision, Fall 2013
Project 5: Object Detection

Brief
- Assigned: Saturday, November 23, 2013
- Code Due: Thursday, December 5, 2013 (by 11:59pm)
- Artifact Due: Friday, December 6, 2013 (by 11:59pm)
- For the demos on Friday, please download this set of files: pedestrian_demo.zip
- This assignment should be done in groups of 2 students.
Introduction
The goal of this project is to implement a simple, effective method for detecting pedestrians in an image. You will be working off of the technique of Dalal and Triggs (PDF) from 2005. This technique has four main components:- A feature descriptor. We first need a way to describe an image region with a high-dimensional descriptor. For this project, you will be implementing two descriptors: tiny images and histogram of gradients (HOG) features.
- A learning method. Next, we need a way to learn to classify an image region (described using one of the features above) as a pedestrian or not. For this, we will be using support vector machines (SVMs) and a large training dataset of image regions containing pedestrians (positive examples) or not containing pedestrians (negative examples).
- A sliding window detector. Using our classifer, we can tell if an image region looks like a pedestrian or not. The next step is to run this classifier as a sliding window detector on an input image in order to detect all instances of pedestrians in that image. In order to detect pedestrians at multiple scales we run our sliding window detector at multiple scales to form a pyramid of detector responses.
- Non-maxima suppression. Given the pyramid generated by the sliding window detector the final step is to find the best detections in each region by selecting the strongest responses within a neighborhood within an image and across scales.
Downloads
- Skeleton code For this assignment we will distribute the skeleton code using git. (This should help make distributing any updates easier.) Please install git on your system; installed, you can download the code by typing (using the command-line interface to git)
- Solution executables: Mac, Linux, Windows
- Cropped Pedestrian Dataset (18 MB). You will use this dataset for training and testing your detector.
- Full Image Pedestrian Dataset (10 MB). You will use this dataset to test your sliding windows and non-maxima suppression code.
- Full negatives set (87 MB, only for extra credit)
For those that are already using git to work in groups, you can still share code with your partner by having multiple masters to your local repository (one being this original repository and the other some remote service like github where you host the code you are working on); here's a reference with more information.
Compiling
Dependencies
- libjpeg
- libpng
- FLTK
- CMake
Generating project files with CMake
This project
uses CMake to generate compilation files from a set of
project description
files CMakeLists.txt. For those unfamiliar
with CMake you can find out more about it in
this wiki. Cmake is
readily available on Linux, and can be downloaded for other platforms
(both command line or GUI version
available here.
CMake searches for dependencies and can automatically generate compilation
instructions in the form of Makefiles, Visual Studio project files,
XCode project files, etc (run cmake -h to see a full list of
project formats). The basic procedure for generating these files with the
command line tool is to first create directory where the compilation files will go
>> cd path/with/source
>> mkdir build
>> cd build
and then running cmake inside the build directory. The
simplest form is
>> cmake .. # Assuming here you are inside the previously created build directory
the command will search for dependencies and generate a Makefile. Now,
if you have no errors you can build the project with
>> make
if you are getting compilation errors related to linking and headers
that were not found it might useful to run
>> VERBOSE=1 make
this will output all commands that CMake is running (normally
it only prints out which file it is currently working on).
CMake can also generate build instructions in debug and
release modes with the following flags
>> cmake -DCMAKE_BUILD_TYPE=Debug ..
>> cmake -DCMAKE_BUILD_TYPE=Release ..
To generate project files for other IDEs you can use the flag -G
>> cmake -G Xcode ..
Windows
CMake also has a GUI that is especially useful in Microsoft Windows
environments. TIPS: When generating project files for Visual Studio make sure to tell CMake to generate
32-bit projects (by selecting Visual Studio 10 as the compiler when it asks,
instead of Visual Studio 10 x64). Once you generate the Visual Studio project and open it,
you might also want to manually set the startup
project to objdet (instead of ALL_BUILD) to get the debugging
to work properly (to do this, right-click on the objdet
project in Visual Studio, and select Set as StartUp Project.
Using the software
This project has a GUI and a command line interface, which are complimentary to each
other. The GUI serves as a way to visually inspect different aspects of the
pipline and to fine tune parameters. The command line interface is used to
train our classifier and test it on the datasets we will provide. You can
also load the generated classifier into the GUI and run it on individual images.
>> mkdir build
>> cd build
>> cmake -DCMAKE_BUILD_TYPE=Release ..
To launch the GUI simply run the command without arguments or double click on its icon.
To get help with the command line interface run objdet -h.
Training a classifier
In order to train a new SVM classifier you will run the following commandhog.svm.
The .dataset file contains a list of filenames and the class of each image.
A +1 before the filename indicates a file that contains a pedestrian, while
-1 indicates that there are no pedestrians. Finally, the program will save
the trained model into the file hog.svm.
The HOG feature extractor created uses the default parameters, if you want to try different settings you can do so by choosing them in the GUI, saving them to file with "File/Save Parameters" and then running
-f flag used to choose the descriptor is
no longer necessary as this information is saved in the params file.
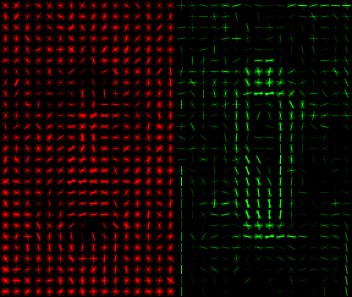
Once you have a trained classifier you can visualize its weights in
the GUI by loading the .svm file and clicking on the
menu item "SVM/Show SVM Weights". For the HOG descriptor the GUI will
display an image that is similar to the following one
Testing the classifier
To test the classifier you will run the commandpedestrian_test, extract
descriptors, and classify them using the classifier stored in
hog.svm. In the terminal you see the average precision
of the classifier on the given dataset. The command also generates
a .pr file, which contains the Precision-Recall curve,
and a .cdataset file, which contains the classifier
output for each input image.
To visualize the PR curve we provide
the MATLAB script plot_pr.m that can plot multiple
curves at once (in case you want to compare results for different
settings or descriptors). To generate a plot for the PR curves
hog.pr and ti.pr you can invoke the
script in MATLAB
'output'
option followed by the output filename. An example of the precision-recall
curve for the solution code is show below:

Sliding window detection
So far we have trained and tested the classifier on cropped images, where the image either contained a pedestrian or not. A more realistic use is to run the classifier on an uncropped image, evaluating for every possible location and scale wether there is an instance of the object of interests or not. The final parts of this project involve implementing the functionality that will evaluate the classifier you train on a all scales and locations of an image and to select the best detections inside an image. Once this is done you will test your sliding window detector with the following command.dataset
file, instead of the .cdataset one we used before. This datset file format
specifies uncropped images together with the location of possibly multiple pedestrians.
Here again you can fine tune the parameters for the image pyramid
and non-maxima supression in the GUI, save them, and pass them
to the command line with the flag -p. Note that
here only the image pyarmid and non-maxima supression parameters
in the file will be used, the feature extraction parameters are fixed
and contained in the .svm file.
When implementing the sliding window detection you might find it
useful to inspect the result of applying the classifier to
an image. You can visualize this in the GUI in the "SVM Response"
tab. To fine tune parameters and visualize the results of your implementation
of non-maxima suppression you can use the "Detections" tab in the GUI.
Exposing More Parameters
If you find it necessary to add extra parameters to any of the classes that are manipulated in the GUI (e.g., your feature extractor or your non maxima suppression code) you can easily expose these fields by editing three methods:getDefaultParameters. This method retuns an instance of ParametersMap that is initially exposed in the GUI.getParameters. This method returns the current value of the parameters for the class.- The class constructor that takes as input an instance of
ParametersMap. In the constructor you will retrieve the value for your new parameter.
ParametersMap, which is essentially a dictionary
that associates strings (the parameter name) to the parameter values. By editing these three methods
you expose the fields in the GUI and ensure that they are properly read and stored to file.
Todo
All TODOs are part of the library subprojectod
Feature.cppTinyImageGradFeatureExtractor::operator()
Extract a simple descriptor by downsampling the input image and computing
the gradient magnitude. We already provide a more basic feature in
HOGFeatureExtractor::operator()
The HOG descriptor, as described in class, divides an image region
into a set of k x k cells, computes a histogram of
gradient orientations for each cell, normalizes each
histogram, and then concatenates the histogram for each
cell into a single, high-dimensional descriptor vector.
Please see the lecture notes and the Dalal and Triggs
paper for more information.
TinyImageFeatureExtractorthat should help you familiarize yourself with the code.- SupportVectorMachine.cpp
- SVM Train
- SVM Sliding Window
Detection.cppDetection::relativeOverlap
Compute the relative overlap between two detections. This is used in non-maxima
suppression and in the evaluation code.
ObjectDetector.cpp
Implement NMS within an image and across different levels of a
response pyramid.
Turnin
In addition to the code, you will need to turn in a zipfile with.param files, along with a webpage, as the
artifact. Your zipfile should contain the following items:
- The
.paramsfiles you used to generate the results in the report. One for HOG (hog.params) and another one for TIG (tig.params). We will run your code on two separate datasets (one of cropped images to evaluate the feature descriptor and another one with full images to evaluate the NMS) containing images that were not released and the top scorering groups will receive extra credit. - A webpage containing
- Visualizations generated by the GUI of the two features you implemented.
- The visualizations of the SVM Weights for you classifiers (for both classifiers).
- Precision recall curves computed with the croppped image test dataset containing results for TIG and HOG features. You can additionally show the PR curve for other variants of the feature descriptors you implement.
- Precision recall curves for the test image dataset
test.datasetfor both descriptors. - Please describe any extra credit items on your webpage.
Further Reading
- A recent survey on the best methods for pedestrian detection.
- Rodrigo Benenson et al presented recently a collection of improvements to the detector implemented in this project that gives it a significant boost in performace. You can use this as inspiration for extra credit.
- HOGgles: a better way to visualize HOGs (whith MATLAB code available).
- Rujikietgumjorn and Collins discuss a new way of handing occlusion
- A disadvantage of the method implemented in this project is that the classifier will recognize a single view of an object (in our case a frontal or back view of a pedestrian). Nevertheless Malisiewicz et al. show that by combining multiple classifiers into an ensemble, each one trained on a different view of an object, we can actually detect objects in any configuration. Furthermore, they show that each of the individual classifiers can be trained with a single image of the object/view of interest, as long as a large collection of negative examples is supplied.
- Another approach for generalizing this classifier to objects in general pose and view is the work of Pedro Felzenszwalb et al. At a high level these algorithms combine multiple classifiers similar to the one you implemented in this project, but now each one is specialized at detecting one part of the object (e.g., leg or arm or head).
Extra credit
Here are some ideas of things you can implement for extra credit (some of these are described in the Dalal and Triggs paper):- Have cells overlap (so that pixels contribute to more than one cell)
- The block normalization described in the original paper
- A way to mine for hard negatives and improve your classifier (see the original paper for an explanation)
- Invent your own feature descriptor
- A principled way to handle occlusions
Last modified on December 4, 2013